Phys410 - Classical Mechanics
University of Maryland, College Park
Fall 2011, Professor: Ted Jacobson
Notes, Demos and Supplements
In these notes I'll try to just indicate the topics covered in
class.
I'll also mention things I talk about in class that are not also in
the textbook,
as well as supplementary material, if they are not in last years
notes.
Please do not assume that these
notes are even roughly complete.
Tuesday, Dec.
13
Fluid mechanics:
I'll try to post notes later. In the meantime, two excellent
introductory references:
Elementary Fluid Mechanics,
Tsutomu Kambe, World Scientific
Feynman Lectures on Physics,
vol 2, Chapters 40 & 41
Article on modeling strings with
stiffness modulus.
Thursday, Dec. 08
More on Lagrangian for an elastic solid... some of what I
said Thursday I put in last Tuesday's notes, for completeness
there.
A nice reference on elasticity at an elementary but
sophisticated level:
Feynman
Lectures on Physics, vol 2, Chapters 38 & 39
If a solid is not isotropic, there can be many different elastic
moduli. If the solid is a crystal with some symmetry properties,
those symmetries restrict the number of independent moduli. For
example, a crystal with cubic symmetry has only three
independent moduli.
(In class I said it was effectively isotropic and had only two,
but that was a mistake.) In two dimensions, a crystal with
square symmetry
still has three independent elastic moduli. I think these are a
bulk modulus associated with isotropic dilatation, and two shear
moduli,
associated with shear along the crystal axes or at 45 degrees to
these axes. A two dimensional crystal with hexagonal symmetry,
like graphene, actually has enough symmetry to make it isotropic
at this level: it has just two elastic moduli.
Lagrangian for electromagnetic
field
First, wrote Maxwell's equations in terms of the
potentials V and A.
Then recalled how a charge couples to these, and generalized
that to a charge density and current density:
L_e = ∫ (- rho V + A.j) d^3x.
What about the Lagrangian for the field?
I argued it must be constructed from the potentials, be a
scalar, gauge invariant, and since
Maxwell's equations are linear in second derivatives
of the potentials the action must be quadratic
in the potentials and involve two derivatives. This list of
requirements allows only
E^2, B^2, and E.B. It turns out the last one
can be expressed in terms of a sum of total time or space
derivatives, hence doesn't affect
the equations of motion. [This is a bit complicated to show
directly using this notation, but it's easy to see that its
contribution to the
Lagrange equations is automatically zero: the variation of V is
proportional to div B,
while the variation of A
is proportional to
∂tB + curl E, both of which vanish
identically when E and B are expressed in terms of
the potentials.] The relative coefficient
of E^2 and B^2 can be determined by requiring consistency with
relativity: In any electromagnetic plane wave E^2 - B^2 = 0
(in units with c =1). In a different frame, E and B are
different, but E^2 - B^2 must still
be zero, since a plane wave
in one frame is still a plane wave in another frame. So at least
in this case E^2 - B^2 is the same in
all frames, hence this is the
only Lorentz-invariant candidate combination of E^2 and B^2. In
fact this combination is always the same in all frames, for any
electromagnetic field. (The only other such invariant is E.B.) Hence it must be the integrand of the
Lagrangian:
L = 1/2 ∫ (E^2 - B^2) d^3 x.
Carrying out the variation of the total action I showed that it
yields Maxwell's equations.
Tuesday, Dec. 06
Mentioned action for relativistic string: it's the string tension
times the spacetime "area" of the string "worldsheet"...
Lagrangian for small displacements
of a stretched (non-relativistic) string: L =
∫ 1/2 [µ (∂y/∂t)2
- T (∂y/∂x)2]
dx, where
y(x,t) specifies the string displacement, assumed in a
fixed plane, away from a straight equilibrium
µ is the mass per unit length,
T is the tension.
This is derived under the assumption that the displacement is
small, so in particular the slope ∂y/∂x
is always much smaller
than 1. Also this allows us to treat the mass density and tension as
constant. We neglect longitudinal (compression type)
disturbances of the string as well as any restoring force due to
stiffness. Only the potential energy associated with changing the
length of the string is taken into account. The work to
stretch the string an amount dl is T dl, so the potential energy
of the string
is U = T (∫ ds - a), where ds is the length along the
string, and a is the unstretched length. Now
ds = √dx^2 + dy^2 = dx √1 + (∂y/∂x)2
= dx(1 + 1/2 (∂y/∂x)2 +
...)
so in our approximation the potential energy is U = 1/2
T ∫ (∂y/∂x)2
dx. The kinetic energy is ∫ 1/2 µ
(∂y/∂t)2 dx.
This yields the
above Lagrangian.
Equations of motion: the
action is S = ∫ L dt. We fix y = 0 at the two ends, and fix
the value of y at the initial and final times,
and require that, subject to these boundary conditions, the
variation of the action is zero for all possible variations. This
yields
the wave equation: ∂2y/∂t2
= (T/µ)
∂2y/∂x2,
with wave speed √T/µ. In
getting this we have to integrate by parts on the derivatives
of the variations. Our boundary conditions enforce the vanishing
of the resulting boundary terms.
An alternate boundary condition to fixed ends (y = 0, Dirichlet
boundary condition) would be free ends. This would apply for
example if the string were attatched to massless rings that
slide with out friction on vertical rods. The force on a
massless ring
must vanish, so the tension must have no vertical component at
the end. The boundary condition in this case is therefore
∂y/∂x = 0.
How about if the ring at x=l has mass? Then there is no
boundary condition on y, so a boundary term at x = l would arise
when
we vary y. But then we must include the ring in the system, as
it carries energy. We could do that by adding a term 1/2 m (∂y(l)/∂t)2.
This would also contribute a term proportional to the variation of
y(l), which must cancel the one from the string. That cancellation
condition is nothing but Newton's law for the ring, m ∂2y/∂t2
= - T
∂y/∂x at x = l. Here's a nice problem:
assume the motion has a fixed
frequency, y(x,t) = cos(wt) f(x). Plug this into the wave
equation and boundary equations, and find the allowed
frequencies and
normal mode shapes f(x). If you do this, I suggest you adopt
units with µ = T = a = 1, so
the only parameter will be m.
Lagrangian for elastic solid
- This generalizes the idea of a spring with potential energy 1/2
k(x-x0)^2, where x0 is the equilibrium
position. For a solid, the deformation is described by a vector
field u^i(x,t) giving the displacement of the mass element that was
originally
at the position x (in 3d). If the solid is just translated rigidly,
there is no deformation, so the potential energy must depend on the
derivatives
∂i uj. We can think of this collection of
derivatives as a matrix, which can be decomposed into the sum of an
antisymmetric part
1/2(∂i uj - ∂i uj) and
a symmetric part uij = 1/2(∂i uj +
∂i uj) called the strain. As I'll try to explain later, for small
deformations the antisymmetric
part describes rotation, which doesn't deform the material, hence
costs no potential energy, so only the strain enters the potential
energy.
which will be quadratic in the strain. The strain can be decompsed
into its tracefree part u~ij = uij - 1/3 ukkδij,
and its trace part 1/3 ukkδij.
The trace part describes dilation,
and the tracefree part describes (pure) shear. Shear is volume preserving, non-rotational
linear transformation.
If the solid is isotropic
(same in all directions), then there are only two independent
combinations of strain components that can
enter the potential energy, hence two elastic moduli. These moduli are the "spring
constants" of the solid. One is the bulk modulus, K_b, which
multiplies the square of the trace of u, and so determines the
potential energy associated with dilations. The other is the shear modulus, K_s,
which multiplies the trace of the square of the tracefree part, and
so determines the potential energy associated with shear. The
potential energy is
U = ∫ [K_b (ukk)^2 + 2 K_s u~iju~ij]
d^3x
Note that u~iju~ij = (uij - 1/3 ukkδij)(uij
- 1/3 ukkδij) = uij uij
- 1/3 (ukk)^2, so we may also write U as
U = 1/2 ∫ [(K_b - 2/3 K_s) (ukk)^2 + 2 K_s uijuij]
d^3x.
The kinetic energy is ∫ 1/2 rho (∂u/∂t)^2 d^3x, where rho is the
mass per unit volume.
Now consider a planar wave that depends only on one coordinate x,
and has only a transverse, y component of u. Then uxy= uyx
= 1/2 ∂u^y/∂x
are the only nonzero components, so ukk = 0. The
potential energy reduces to
U = ∫ 1/2 K_s (∂u^y/∂x)^2 d^3x.
This is now exactly like the Lagrangian for a string, so the
Lagrange equation is the wave equation, with wave speed
√K_s/rho. If we instead consider
a longitudinal plane wave, that has only a longitudinal component
u^x, then uxx= 1/2 ∂u^x/∂x is the only nonzero component,
and the potential energy
reduces to
U = ∫ 1/2 (K_b + 4/3 K_s) (∂u^x/∂x)^2 d^3x.
This is again like the string Lagrangian, but now the wave speed is
√(K_b + 4/3 K_s)/rho. Longitudinal waves in an isotropic solid are
therefore
always faster than transverse ones, by at least a factor of √4/3.
Thursday, Dec. 01
Adiabatic invariants:
- reviewed the general argument for adiabatic invariants.
- applied it to the harmonic oscillator: the invariant is the area
enclosed by the orbit, which is an ellipse.
The area of the ellipse is A = π(x0)(p0). The energy is E = p0^2/2m
= 1/2 mw^2x0^2, so A = 2π E/w, where
w is the angular frequency. We recover again the result found
previously for the pendulum oscillator, I = E/w.
- Showed a Mathematica simulation of a harmonic oscillator with time
dependent frequency that illustrated how one ellipse
evolves into another with approximately the same area. The
simulation showed that the value of the invariant actually
oscillates but the fractional size of the maximum departure in the
oscillation is quite small compared to the adiabatic
parameter a = 2π |w'|/w^2 (which is constant in this example). For
example, for a = 0.1 the maximum relative deviation
is O(0.01) for most initial conditions.
- Looked at an anharmonic potential ~ x^4. It looked like the
adiabatic condition was less satisfied at later times,
because the time dependence of the coupling coefficient was not
adjusted to keep the adiabatic parameter constant.
In the hw, I stipulated a time dependence that does keep the
adiabatic parameter constant (assuming the energy
evolves adiabatically).
- Considered motion of a charge in a uniform magnetic field growing
in time. The adiabatic invariant is proportional
to the magnetic flux through the orbit. Now if the charge is instead
in a time independent field, but moving into
a region of stronger field, it is repelled. We can see this in terms
of the Lorentz force, but also from an effective
potential: using the adiabatic conservation law we expressed the
kinetic energy perpendicular to the field in terms of the
field strength.
Tuesday, Nov. 29
Canonical transformations:
One can change the phase space coordinates (q, p) to new coordinates
(Q,P) and preserve
the form of Hamilton's equations. (Here the index i on different
coordinates and momenta is implicit.)
If this coordinate change is time independent, the Hamiltonian is
unchanged.
(With time dependence, the Hamiltonian is changed.) The condition of
preserving the form of Hamilton's equations
turns out to be equivalent to the condition that all Poisson
brackets are preserved: {f, g}q,p = {f,g}Q,P,
where the subscripts
indicate which coordinates enter in the partial derivatives defining
the Poisson bracket. In fact, this is equivalent to
the condition that {Q^i, Q^j}q,p = 0 = {P_i, P_j}q,p
and {Q^i, P_j}q,p = δ^i_j. Equivalently, the roles of q,
p and Q, P can
be reversed in this statement. Q,P satisfying this are said to be canonically conjugate.
Examples:
- Q = 5q, and P= p/5
- More generally, Q =
Q(q), and P = p (∂q/∂Q).
This is the Hamiltonian version of an arbitrary change of
generalized coordinate in the Lagrangian,
L(q, qdot) = L(q(Q), (∂q/∂Q) Qdot) .
In fact, P can be found directly from the definition of the
canonical momentum:
P = ∂L/∂Qdot = (∂L/∂qdot) (∂q/∂Q) = p (∂q/∂Q).
- Even more generally, the previous example works when there is more
than one generalized coordinate, and ∂q/∂Q is replaced
by the Jacobian ∂q^i/∂Q^j.
- In the previous examples the new Q's depend only on the old q's,
not on the old p's. A generalization of that is Q = p, and p =
-Q.
- A juicier example is to use the Hamiltonian itself as a
coordinate. More specifically, consider a harmonic oscillator with
Hamiltonian
H = p^2/2m + mw^2 x^2/2, and define I = H/w and theta =
arctan(mwq/p) (which is the angle measured clockwise from the p axis
in units with m = w =1). Then {theta, I} = 1, so this coordinate
change is a canonical transformation. Hamilton's equations take a
very simple form in these coordinates: H = wI, so dtheta/dt = ∂H/∂I
= w, and dI/dt = -∂H/∂theta = 0.
Adiabatic Invariants:
Suppose a Hamiltonian depends on an external time dependent
parameter which I'll call k(t) here,
so H = H(q, p, k(t)). Let's restrict for the time being to systems
with a single q,p pair, and consider a closed orbit.
If k(t) changes slowly enough, then although energy is not conserved
there is another quantity that is approximately conserved.
This quantity is called an adiabatic invariant, and is defined by I
= 1/2π ∮p dq. The integral is around the closed orbit, and is
equal to
the phase space area enclosed by the orbit. If k(t) changes slowly
enough, the system moves from one almost closed orbit to another.
Also, the points along the path of one orbit at one time evolve
approximately to points on another orbit of a different energy at
another time.
By continuity the region enclosed by the first orbit flows to the
region enclosed by the second orbit, and by Liouville's theorem
these
regions have the same area, so we conclude that I is "almost
invariant". In the limit of infinitely slow changes, it becomes
exactly
invariant. What does "slow enough" mean for the function k(t)? It
means that the change of k during one orbit is much less than
k itself, i.e. kdot T/k << 1, where T is the period. I am
referring to the dimensionless ratio on the left hand side as the
"adiabatic parameter a".
In many cases the dependence of the adiabatic invariant 1/2π ∮p dq
on energy and k can be found by dimensional analysis: it must be a
function of the energy and k with dimensions of action.
Example: I went through the
example of a simple pendulum whose length is varied by sliding a
frictionless ring that pinches the string so that the
vertex of the oscillation moves downward in time. The work done on
the pendulum is F dy, where dy is the change of the pinch point, dy
taken
positive in the down direction. We can find F as follows. The force
on an infinitesimal segment of string at the ring vanishes. The
tension f in
the pendulum string is constant, since the ring is frictionless. The
vertical tension force f pulling up must be balanced by force F
downward
plus the component f cos theta of the tension pulling downward. Thus
F = f (1-cos theta) ≈ 1/2 f theta^2. This varies during an
oscillation,
but if the change dy happens slowly we can compute the work done
using the average over a cycle: The average of theta^2 is 1/2
theta_0^2
where theta_0 is the amplitude. Also, to lowest order f = mg, which
can be used for small oscillations since theta_0 is already small.
Thus < F > ≈ 1/4 mg theta_0^2 = E/2l, where l is the length of
the string. Since dy = - dl, the work done is
dW = < F > dy = - E/2 dl/l,
hence dE/E + 1/2 dl/l = 0, which implies E√l is constant.
Since the frequency is w = √g/l, this is equivalent to the statement
that E/w is constant.
(Note that E/w has dimensions of action.)
This is what Einstein pointed out to Lorentz in 1911, in answer to
Lorentz' worry that in the quantum condition E = n hbar w n,
the integer n
cannot vary continuously, whereas w and E can. In other words, in a
slowly changing Hamiltonian, the quantum number can be constant.
[I didn't say this in class but: for other systems I(E,w) is not
equal to E/w, but it remains true that ∂I/∂E = 1/w. (See if you can
show this.)]
Tuesday, Nov. 22
- Example:
Hamiltonian description of spherical pendulum.
phi is an ignorable or
cyclic coordinate, hence
p_phi is conserved.
For each p_phi, the p_phi part of the kinetic term in the
Hamlitonian becomes part of the effective potential.
- Example: Spinning
hoop. Bifurcation of the stable equilibrium at theta = 0 into a
pair of stable equilibria, flanking an unstable one.
Phase portrait shows the flow lines tangent to the Hamiltonian
vector field (qdot, pdot).
Liouville's theorem:
"volume" in phase space conserved by the flow. What
is "volume"? In a phase space with N qp pairs,
the volume is defined by the integral of dq1 dp1 ... dqN dpN
over a region.
Each product dq dp has dimensions [qp]=[q LT/q] = [LT]
= [action], where L is the
Lagrangian which has dimensions of energy.
([action] = [energy-time] = [momentum-length] = [angular momentum]).
So the volume in a 2N dimensional phase space has dimensions
[action]^N.
Illustrated Liouville's theorem with the spinning hoop phase
portrait. A simpler example: free particle in 1d: a rectangle in
phase space flows to a parallelogram with the same area. See
text for another example, with a gravitational field.
Proof of Liouville's
theorem: Let v be the Hamiltonian vector field v =
(qdot, pdot) = (∂H/∂p, -∂H/∂q).
Then div v = ∂(∂H/∂p)/∂q
+ ∂(-∂H/∂q)/∂p,
which vanishes since mixed partials commute.
For a 2N dimensional phase space, just put indices on the q's
and p's. The proof goes through,
summing over the qp pairs.
[The commuting of mixed
partials is the most important mathematical fact in physics!]
Examples:
particle beams: a distribution of many particles with some
spread in position and velocities cannot be focused in BOTH
position and velocities
quantum states: a quantum system cannot be focused so that its
possible classical values are smaller than a volume h^N, where h
is Planck's constant,
the "quantum of action". In some respects one quantum state
corresponds to a "cell" of phase space of volume h^N. Then
Liouville's theorem corresponds
to the conservation of the number of distinct quantum states.
Note that the classical state of, for example, a two-particle
system is a point in
a twelve dimensional phase space (each particle has 3 q's and 3
p's). In quantum mechanics, the "state" of a two particle system
is a wavefunction
of six variables (for example, the positions or momenta of the
two particles).
uncertainty relation: If concentrated in q, the spread in p must
increase, and vice versa, if the volume is to remain constant.
So Liouville's theorem
is somehow related to the quantum uncertainty principle.
Entropy:
Boltzmann proposed in the 1870's that entropy be identified with
the logarithm (in class I forgot to
say it's the logarithm)
of the number of microstates compatible
with the macroscopic configuration. [Actually I'm not sure about
what Boltzmann actually proposed...]
Think of a box of gas. The huge
number of molecules in the box live in a very high dimensional
phase. One configuration of the positions and
momenta of all of the molecules corresponds to a point in the
phase space. There are an infinite number of such
points in phase space compatible
with the macroscopic properties of the gas, so an
infinite number of "microstates". But one can regulate this with the
idea that the infinity is
proportional to the phase space volume occupied by all these points.
[I don't know who introduced this idea and when. I always thought it
was
Boltzmann, but a bit of googling did not seem to support that view.]
The infinite proportionality factor becomes an additive constant
after the
logarithm is taken, so the entropy is well-defined up to an
ambiguous additive constant. In QM, the number of independent
states is finite,
and the volume is measured in units of h^N, which removes the
ambiguity of the additive constant.
expansion of a gas: in free expansion, the phase
space volume compatible with the macrostate increases, since the
spatial volume increases and the
energy and therefore momentum distribution (assuming an ideal
gas) stays the same. The entropy
therefore goes up. (The apparent
violation of
Liouville's theorem arises because of the "coarse graining": the
original volume of phase space does not evolve to fill the final
volume, unless you
"blur" it out by coarse graining.) This process of free
expansion is irreversible in practice, and the coarse graining
involves loss of information.
Entropy increases. If the expansion is instead adiabatic, a slow process
pushing against a slowly moving piston, with no heat transfer in
or out of
the gas, then then gas remains in equilibrium at each step. The
gas does work against the piston, transferring energy to it,
decreasing the momenta
(and lowering the temperature), which compensates the increased
spread in position, and the
(coarse grained) phase space volume does not increase.
This process is reversible, and entropy does not
increase.
- Poisson brackets: a
formal development that establishes the link with QM (quantum
mechanics), and also reveals more about the structure of
the Hamiltonian formulation of mechanics and symmetries.
Consider the time dependence of a function A(q,p) on phase
space:
dA/dt = ∂A/∂q qdot + ∂A/∂p pdot
= ∂A/∂q ∂H/∂p - ∂A/∂p
∂H/∂q =: {A, H},
where the last step defines the Poisson bracket { , }. If A has
explicit time dependence of course a term ∂A/∂t must be added.
{A, B} = ∂A/∂q ∂B/∂p - ∂A/∂p
∂B/∂q (Poisson bracket)
Properties:
antisymmetric
bilinear
Liebniz (product) rule {A, BC} = {A, B}C + B{A, C}
Jacobi identity {A, {B, C}} + {B, {C,
A}} + {C, {A, B}} = 0.
Conserved quantities
have vanishing Poisson bracket with the Hamiltonian (assuming
they have no explicit time dependence).
If A and B are conserved, the Jacobi identity implies that {A,
B} is also conserved. Example: if L_x, L_y, and L_z are the
components
of angular momentum, {L_x, L_y} = L_z. [Note the dimensions work
out: { , } has dimensions of 1/[qp] = 1/[angular momentum].]
Canonical Quantization:
Functions on phase space are replaced by matrices or
"operators", whose commutators are determined by the
Poisson brackets of the corresponding classical observables: let
the operator corresponding to the classical observable A be
denoted A^; then [A^, B^] = i hbar {A, B}^.
Thursday, Nov. 17
- Io and the effect of
tidal dissipation on orbits: If a body is in an orbit
and can dissipate energy into say internal heat, but can't
transfer
any angular momentum anywhere then it will settle into the
circular orbit with the minimal energy for the given angular
momentum.
A finite sized body can carry internal "spin" angular momentum
however (or even more complex fluid angular momentum that is not
a rigid spin. Again however, if there is any dissipation
mechanism all extra mechanical energy will disappear,
constrained by the conservation
of the total angular momentum. In particular, the body's
rotation will become locked to the orbital motion, so that it
always presents the
same face to the gravitational center, so that the tidal force
will be time-independent in the rotating frame, and the body
will cease to
dissipate any energy. Io is Jupiter's moon with the orbit
closest to Jupiter. The eccentricity of its orbit is only 0.004
and its rotation is locked
to its revolution around Jupiter...so why doesn't it settle into
a perfectly circular orbit? The reason is due to the
perturbations induced by the
other moons. The small eccentricity
is apparently enough to still generate much tidally induced
internal heating and resulting volcanism.
- Hamiltonian formalism:
Lagrange's equations are n coupled second order ODEs for the n
generalized coordinates. We could always rewrite
this as 2n coupled 1st order equations, by defining new
variables v^i that satisfy qdot^i = v^i, and replacing all
qddot^i by vdot^i. But
there is a much better way to proceed in general, which is to
use not v^i but rather the conjugate momenta p_i = ∂L/∂qdot^i.
Better in what sense?
Well, there are several advantages: (i) the form of the
equations is simpler, (ii) the conservation laws are simpler to
exploit, (iii) the resulting
flow in the phase space of
(q,p) pairs is volume preserving (this is Liouville's theorem), (iv)
there is a general solution method (Hamilton-Jacobi),
(v) it can sometimes provide an convenient approximation method
because of certain approximate conserved quantities that are
easy to get your
hands on, (vi) it has a larger symmetry under which coordinates
and momenta can be mixed, which is sometimes useful in solving
problems,
(vii) it is characterized by a simple and elegant mathematical
structure, namely Poisson
brackets, that turn out to provide the deepest link
between
classical mechanics and the corresponding "quantized" systems,
and in particular shows how a quantum particle should be coupled
to a magnetic
field. So, although it will not really be of any special
use to us in the specific problems we address in this class, it
is rather important and deep.
- Derivation of Hamilton's
equations and the Hamiltonian: I will suppress all
indices in this section.
First a mathematical fact not often enough marvelled over: If f
= f(x,y) is a function of two variables, then df = ∂f/∂x dx + ∂f/∂x
dx.
Now the goal here is to find a function H(q, p), the Hamiltonian,
whose partial derivatives will give us the same information as
Lagrange's
equations have. Here
p = ∂L/∂(qdot)
is the momentum conjugate to q.
That is, we want to get the equations of motion from
setting dH = ∂H/∂q dq + ∂H/∂p
dp
equal to something involving the time derivatives of q and p. To
discover what this H is we can start with dL and massage it
until it's expressed in terms of dq and dp instead of dq and
dqdot:
dL = ∂L/∂q dq + ∂L/∂(qdot)
d(qdot) = ∂L/∂q dq + p
d(qdot), using the definition of p.
Using d(p qdot) = p d(qdot) + qdot dp we can remove the
d(qdot) and rewrite the above relation as
d(p qdot - L) = qdot dp - ∂L/∂q dq.
This leads us to define the Hamiltonian
H(q,p) = p qdot - L,
in which any qdot is replaced by qdot(q,p) that we get by inverting
the definition of the momentum. We
must assume at this
stage that we can solve for the
qdots in terms of the q's and p's. (There is a
generalization of the formalism that deals with the
case that this assumption doesn't hold.) Summarizing then, by
definition of H and p we have
dH = qdot dp - ∂L/∂q dq.
Now comes the link to Lagrange's equations: ∂L/∂q =
pdot! Substituting this in the previous equation gives
dH = qdot dp - pdot dq,
which gives us what we wanted:
qdot = ∂H/∂p
pdot = - ∂H/∂q
These are called Hamilton's
equations, or the canonical
equations. Note that the total time derivative of the
Hamiltonian
is equal to the partial time derivative:
dH/dt = ∂H/∂q qdot + ∂H/∂p pdot + ∂H/∂t
= -pdot
qdot + qdot pdot + ∂H/∂t
= ∂H/∂t
so the Hamiltonian is conserved unless it has explicit tie
dependence. How is the explicit time dependence of the Hamiltonian
related
to that of the Lagrangian? By allowing for t dependence in the above
general derivation one can immediately see that ∂H/∂t = - ∂L/∂t,
where in the derivative on the lhs q and p are held fixed, while on
the rhs q and qdot are held fixed. This relation can also be
verified
by direct computation, writing H(q, p, t) = p qdot(q, p, t) - L(q,
qdot(q, p, t), t) and taking the partial with respect to t of the
right hand side,
holding q and p fixed. Thus H is conserved if and only if H has no
explicit time dependence which holds if and only if L has no
explicit
time dependence.
What is the "meaning" of the Hamiltonian? For systems of a certain
form it is just the total energy, T + U, but that's not always the
case.
- Examples: I applied all
this to various examples:
1. bead on
spinning parabolic wire: here the conservation of H is very
useful. Also here H is not the total energy, but rather it is
T_rho + T_z - T_phi + U, i.e. the phi component of the kinetic
energy contributes negatively. As we saw previously, H = E - J Ω,
where
E is the energy, J is the angular momentum, and Ω is the angular
velocity of the wire. One way to understand this is that the
symmetry
in this system is a combination of time translation and rotation.
Another is to recognize that d(J Ω) = dJ Ω = (torque) dt dphi/dt =
torque dphi,
i.e. it is the work done by the torque, which should be subtracted
to get the "leftover" part of the energy that is conserved. In this
accounting,
we don't count the angular kinetic energy, because in effect we are
in the rotating frame (I think). Oliver suggested another, perhaps
simpler
way of looking at this: any angular part of the kinetic energy is a
result of the work done by the wire on the bead, and that work shows
up
in the energy accounting in terms of the rho and z degrees of
freedom, so to get a conserved quantity we should subtract it from
the latter.
[Oliver, is that what you meant?] I think this is right, but I don't
claim I've formulated it with 100% precision...
2. charged
particle in external vector potential: p = m xdot + eA, so xdot = (p -
eA)/m, and H = (p - eA)^2/2m.
As an illustration I looked at a uniform electric field described by
a time-dependent vector potential A
= - E0 t.
Then the rather peculiar looking Hamiltonian is H = (p + eE0 t)^2/2m. Note that it is translation
invariant, so that
the (canonical) momentum is conserved, even though of course the
velocity is not conserved. An it is time dependent,
so the Hamiltonian is not conserved. This is no surprise, since the
numerical value of the Hamiltonian is nothing but the
kinetic energy. The only way that a particle in a uniform electric
field can have a conserved energy is if we include the
potential energy in the definition of the energy. This would happen
if we used a scalar potential V = - E0.x instead of
a vector potential. Then the Hamiltonian would be H = p^2/2m - eE0.x.
The canonical momentum in the E0 direction
would then not be
conserved, but the Hamiltonian is time independent, so that it would
be conserved and equal to the
kinetic plus potential energy. A lesson from this
example is that the canonical momentum depends on the gauge
choice.
3. simple
pendulum: there are two equilibrium points: theta = 0
which is stable, and theta = π which is unstable (we're
assuming here the pendulum hangs on a rigid massless rod). I
drew a phase portrait somewhat like this
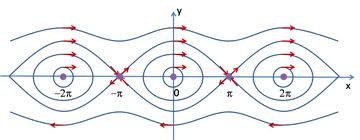
[from : http://mathematicalgarden.wordpress.com/2009/03/29/nonlinear-pendulum/]
Unfortunately this figure doesn't accurately reflect the
different lengths of the velocity vectors. The equilibrium at
the origin is an elliptic
point. The one at π is a hyperbolic point. The vector field vanishes
at these points.
Tuesday, Nov. 15
- Lorentz contraction with
spacetime diagrams: what is the line whose length is measured?
It's the simultaneoity slice of the given
observer. So observers don't really disagree on the length of an
object, they just differ on what length they are talking about.
- EM coupling: The
action for the coupling of a charge needs no "relativistic
correction", its already perfectly consistent with relativity,
whcih is no accident, since after all it was the properties of
electromagnetism that led Einstein to discover relativity.
The EM coupling action
is given by -q∫ A.ds, where A=(V, Ac) is the electromagnetic 4-vector
potential, and ds=(dt, dx/c) is the spacetime
translation and the dot is the
Minkowski dot product. [I didn't say this in class, but actually
an even better way to say this is that the action is -q∫ Amdxm,
where there is a
summation over the four values of m, dxm
are the components of ds, and Am= (V,
-Aic), the index i being just the spatial part.
I made the point
that just given the scalar potential term -q∫ V dt, relativity would
tell you that dt can't stand alone, and that you had better replace
V by a 4-vector.
(Alternatively you could invent a theory where V is a scalar and you
replace dt by dtau.) Then the existence of magnetism, and Faraday's
law,
would all just follow from relativity without any experiment!
-
Gravitomagnetism: This
is not something I addressed in class, but it seems worth
mentioning for those who are interested.
In class it was explained how Now
we can see that for weak gravitational fields there is a phenomenon
that looks like a gravitational version of magnetism.
If we denote the Minkowski metric by g0_mn and the metric
perturbation by h_mn, the proper time becomes dtau = √(g0mn
+ hmn)dxm dxn.
If we expand this in h and assume low velocities it becomes dtau =
√(g0mndxm dxn) + Amdxm
+ ..., where A0= h00/2,
and Ai= h0i.
So the 0i off-diagonal components of the metric perturbation act
like magnetic vector potential. Why would we have such components?
If the source mass
is moving relative to a given frame, then such components arise. For
example, a spinning body like the earth produces a gravitomagnetic
vector potential.
- Gravitational field equation for Newtonian and Einsteinian
cases... Newtonian: gravitational force = mg, field
equation is div g = -4πG rho_m.
The fact that div g = 0 in
vacuum implies that tidal deformation is volume preserving
to second order in time. Proof: consider a bunch of test particles
that start at rest. Their velocity after time t is v(x,t) = g(x,0) t + O(t^2), where I am
labeling the particle by its position x at t=0. (The O(t^2) terms would
include the effect of the particle moving to another location where
g has a different value, the
fact that g itself might be
changing in time, and the fact that
the particle in any case is accelerated.) It follows that div
v = O(t^2). The significance
of this is that a divergence-free velocity field generates a volume
preserving flow. One way to see this is to imagine a volume V in
space. The divergence theorem tells us that ∫V div v d(vol) = ∫∂V v.da, where ∂V is the
surface bounding the volume V. If the divergence is zero, then the
vector field has no net flux through the surface. But this flux
describes the rate of change
of the volume with respect to time as the volume deforms under the
flow. That is, dV/dt = ∫V div v d(vol). For a small V we can approximate this
integral by
(div v)V. Given that the
divergence of the gravitationally induced velocity field is O(t^2)
this means that our small volume of test particles satisfies
(dV/dt)/V = O(t^2). The volume as a function of time is thus V(t) =
V(0) + O(t^3), there is no 2nd order change. If we are not in vacuum
then instead
(dV/dt)/V = -4πG rho_m t, so V(t) = (1 - 2πG rho_m t^2) V(0) +
O(t^3).
In general relativity the deformation of a volume of freely falling
test particles is determined by the geodesic equation, which is
determined by the line
element. The volume preserving at second order property carries over
to general relativity for a bunch of test particles at rest in ANY
local freely falling frame
in vacuum. In fact, this statement is equivalent to the vacuum
Einstein equation. In the presence of matter, the mass density rho_m
is replaced by the energy
density plus 3 times the pressure (if the pressure is isotropic).
Here is an introductory
article by Baez and Bunn explaining this viewpoint on
Einstein's field equation.
Thursday, Nov. 10
- More on the rod hanging from a string (problem S7.3):
I wanted to sort of demonstrate, by comparing with a simple
pendulum of length R/6,
that the frequency of the rapid mode in the case l >> R is
indeed sqrt[g/(R/6)]. I didn't have a true simple pendulum but
only
a sphere whose radius was perhaps half the length. But it seemed
to match roughly. Hmm, let's figure out the period
of the sphere on a string. For any physical pendulum, we have a
lagrangian L = 1/2 I thetadot^2 - Mgl(1-cos(theta)), where I is
the
moment of inertia about the pivot, M is the total mass, and l is
the distance from pivot to CM. The
angular frequency w for small
oscillations is w = sqrt[Mgl/I]. The
moment of inertia about the center of a uniform sphere of radius
r is (2/5)Mr^2. Using the
parallel axis theorem we get I by adding to this Ml^2, so
I=M(l^2 + (2/5)r^2). Thus the frequency is w = sqrt(g/l)/sqrt[1
+ (2/5)(r/l)^2].
If r=l the correction is to multiply by 1/sqrt(1 + 2/5) ~ 1 -
1/5 = 4/5 = 0.8, i.e. about a 20% decrease in frequency. If r =
l/2, which is
closer to the case we had, the correction is 4 times smaller,
around 5%. So it was a reasonable comparison, given the
experimental
uncertainty!
Then I went on to ask about the amplitude ratio in the modes
when l = R, specifically the lower frequency mode, where it
looks like
the pendulum is just swinging in a straight line. I spaced out
and asked Justin to calculate the eigenvectors of the M matrix
which
didn't make any sense, but Chris pointed out that I forgot about
K! So we are looking for the w values and zero-eigenvectors of
w2
M - K, which we can re-write as w2 K(K-1M
- w-2). Since w2
K is invertible we can just peel it off, so we're looking for
the
eigenvectors and eigenvalues of K-1
M. (I write it this way, rather than
inverting M, since K is easy to invert, being diagonal in this
case.)
The eigenvalues will represent the reciprocal squared
frequencies.
OK, so we have K = diag(1, 1/2), so K-1
= diag(1, 2), and M = {{1,1/2},{1/2, 1/3}}, so K-1M
= {{1,1/2},{1, 2/3}}.
The eigenvector in the low frequency mode can be written as {1,
1.12} (I used the Mathematica "Eigensystem" to find this,
and evaluated the ratio of the resulting amplitudes.) So the lower
angle amplitude is 12% more than the upper one. It was
not possible to really confirm this, even roughly, because I
couldn't get the pendulum to swing just in this normal mode
without the other mode also excited. But now it occurs to me that I
could perhaps have done that by driving the system at the
resonant frequency. Next class I'll try that!
- Compton scattering: I described the
Feynman diagrams that contribute to Compton scattering at lowest
order ("tree-level"),
just to fill in the picture. There are two diagrams. The
incoming photon is destroyed, and a new photon is created.
A terrestrial application of Compton scattering is to radiation
therapy: scattering gamma rays from electrons in the body
damages cells. The probability of an interaction is small and
equal along the flight path of the photon. Intersecting beams of
photons are arranged to selectively target a tumor.
- Inverse Compton scattering:
this is really just Compton scattering viewed in a frame in
which the incoming electron
has a lot of energy that it transfers to a photon. It can
"upscatter" photons into very high energies, and is relevant in
high
energy astrophysics. Actually it also happens in terrestrial
synchrotrons. See http://en.wikipedia.org/wiki/Compton_scattering
(At the GRenoble
Anneau Accelerateur Laser they produce (polarized) gamma
ray photons of energy 0.3 - 1.5 GeV by
colliding 6 GeV electrons with polarized UV laser light (3.53 eV
photons).)
- a little more on the LHC and the Higgs particle: I put this
info in last Tuesday's notes.
- General Relativity:
Background:
Newtonian spacetime structure assumes 1) absolute time t, 2)
spatial distance at constant time, 3) absolute rest or
family of inertial frames. Instead spacetime in special
relativity is fully characterized by the Minkowski line element
which
determines the proper time along any displacement. This encodes
time, distance, and inertial structure all in one spacetime
geometry. (The inertial motions maximize the proper time.) Now
where does gravity fit in to this?
Gravity and
inertial force: Einstein focused on the extremely well
known fact that the gravitational force is proportional to
the mass of the object it is acting on: F = mg, where g(x,t) is the gravitational field. This means that
the effects of gravity can
be locally removed by using a "freely falling" reference frame
with acceleration g relative
to what a Newtonian would consider
an inertial frame. But Einstein proposed that we should think of
it the other way around: the freely falling frame is the
inertial one,
and then one interprets the gravitational force as an inertial
force, due to working in a reference frame with acceleration -g.
So, for example, sitting in my chair, I am in a frame
accelerating upwards relative to the local inertial frames.
Gravity as
tidal field: While the local inertial frames can be
identified with the freely falling frames, we must face the fact
that
these frames are not the same everywhere. For example, at
different points near the surface of the earth the free-fall
frames
are falling inward radially, and the radial direction depends on
where you are. Also the acceleration is greater closer to the
earth than
farther. This is reflected in the simple fact that the
derivatives of g are
not zero, so that nearby freely falling particles have slightly
different accelerations. You could recognize this in a falling
elevator: if release a spherical cluster of particles, as the
cluster falls it
will deform to an ellipsoid, compressed in the transverse
direction and stretched in the falling direction. The true
essence of gravity
is this "tidal deformation". If it weren't for that, we could
just cancel off gravity once and for all by changing the
reference frame.
Spacetime
curvature and the tidal field: Given that the inertial
structure of spacetime is determined in special relativity by
the line
element, it must be that a spatially varying inertial structure
is described by a spatially vaying line element, that is, by a
deformation
of the geometry of spacetime. In fact, the curvature of the
spacetime geometry captures the notion of varying inertial
structure.
As a concrete example, freely falling paths can start out
parallel in spacetime, and be pulled togetther by the
gravitational tidal
field. That parallel lines do not remain parallel is a sign of
curvature. The motion of a test particle in such a spacetime is
determined
by maximizing the proper time, using the line element of the
curved geometry.
Spacetime
geometry outside a spherical gravitating mass:
Einstein's field equation for spacetime geometry has a unique
spherically
symmetric, vacuum solution, up to one parameter corresponding to
the mass M. That Schwarzschild
metric can be expressed
using so-called Schwarzschild
coordinates as
ds^2 = F(r) dt^2 - (1/F(r)) dr^2/c^2 - (r/c)^2 (dtheta^2 +
sin^2theta dphi^2)
where F(r) = 1 - r_g/r, and r_g = 2GM/c^2 = 3km (M/M_sun) is the
Schwarzschild radius. If
M = 0 then F(r) = 1, and this is
just the flat spacetime, Minkowski line element in spherical
coordinates. At r = r_g something goes wrong with the
coordinates,
but the spacetime is fine there. This line element describes a black hole event horizon at
r = r_g. For a star, the stellar surface lies
outside r_g, and the line element inside the star is not given
by the Schwarzschild metric.
Cosmological
line element: A simpler example of a curved spacetime
is an expanding universe. If we average over the lumpiness
this can be described as a homogeneous, isotropic spacetime,
with line element
ds^2 = dt^2 - a(t)^2(dx^2 + dy^2 +dz^2)/c^2
The function a(t) is called the scale factor, and it determines how much
physical distance corresponds to a given coordinate displacement
dx, for example. Before the acceleration of the universe today
was discovered, it was believed that a(t) was ~ t^2/3, so that
the scale factor
was increasing with time with a rate ~ t^-1/3 that was
decreasing in time. This would be "decelerated expansion". Now
it appears that
infact the expansion rate is increasing. The simplest such
increase, that would be caused by a cosmological constant, would
be exponential,
a ~ e^Ht, in which case the rate would be exponentially
increasing as well.
Newtonian
limit of particle motion in the Schwarzschild field:
The action for a particle of rest mass m is -mc^2 ∫ ds. For the
Schwarschild
geometry this gives
S = -mc^2 ∫ ds = -mc^2 ∫
Sqrt[F dt^2 - (1/F) dr^2/c^2 - (r/c)^2 (dtheta^2 +
sin^2theta dphi^2)]
= -mc^2 ∫ dt
Sqrt[F - (1/F) (dr/dt)^2/c^2 - (r/c)^2 ((dtheta/dt)^2 +
sin^2theta (dphi/dt)^2)]
If we restruct attention to values of r such that r_g/r << 1,
and values of the velocity that a much less than the speed of light,
we may expand the
square root and drop all but the leading order terms in r_g/r and
v/c, in which case the action becomes
= -mc^2 ∫ dt [1 -
GM/(c^2 r) - 1/2 v^2/c^2 + ...]
= = ∫ dt [-mc^2
+ GMm/r + 1/2 mv^2 + ...].
This shows that the Lagrangian is a constant -mc^2 plus the
Newtonian Lagrangian, plus corrections...
Tuesday, Nov. 8
- Went over the problem of the physical pendulum (linear
rod) suspended from a string, and demonstrated the motion.
- 4-velocity: u = ds/dtau = (dt/dtau, d(x/c)/dtau) = (γ, γ/c
dx/dt)
= γ(1, v/c), where v is the usual 3-velocity v = dx/dt.
Note u^2 = u.u = (ds/dtau).(ds/dtau) = (ds.ds)/(dtau)^2 = 1. So
the 4-velocity is a unit vector.
Consider two 4-velocities, u_1 and u_2. Their dot product is γ,
the relative gamma factor between them. Why? Well let's evaluate
it using
the components in the frame of u_1, so u_1 = (1,0,0,0) and u_2 =
γ(1, v/c), so u_1.u_2 = γ.
- 4-momentum revisited: We can express a
timelike 4-momentum in terms of the 4-velocity and the rest
mass:
p = (mc^2) u
Squaring both sides (i.e. dotting with themselves) yields the
mass shell condition, p^2 = m^2 c^4.
If we have two different timelike 4-momenta, p_1 and p_2,
combining the previous results immediately yields
p_1.p_2 = γ m_1 m_2
c^4.
- Energy measured by an
observer with 4-velocity u_obs is
E_obs = p.u_obs.
Why? Well in the rest frame of the observer u_obs = (1, 0, 0, 0)
and p = (E_obs, p_obs
c), from which it immediately follows.
So we can pick off the observed energy by dotting the 4-momentum
with the observer's 4-velocity.
- Frequency
measured by an observer: If k is the 4-wavevector, then
in the frame of the observer we have k = (w_obs, k_obs c), so
w_obs = k.u_obs.
Doppler effect: If a source
with 4-velocity u_s emits a photon with 4-wavevector k that is
observed to travel at angle theta relative to the
motion of the the source by an observer with 4-velosity u_obs, what
is w_obs? In the frame of the observer we have
u_obs = (1, 0, 0, 0)
u_s = γ(1, v, 0, 0)
k = (w_obs, w_obs
khat)
= w_obs(1, cos(theta), sin(theta), 0)
Thus w_s = k.u_s = w_obs γ(1 - v
cos(theta)), which yields the relativistic Doppler
formula,
w_obs = w_s/[γ(1 - v
cos(theta))]
When theta = 0 this can be written as w_s Sqrt[(1+v/c)/(1-v/c)].
When theta = π this can be written as w_s Sqrt[(1-v/c)/(1+v/c)].
When theta = π/2 this is just w_s/γ.
This is the transverse Doppler
effect, which just arises from the time dilation between
the frame of the
source and the frame of the observer.
Thursday, Nov. 3
"Look Ma, no Lorentz
transformations" - Just as we rarely use
rotations explicitly in nonrelativistic mechanics,
but instead make wise choices of coordinate systems and use
rotational invariant quantities like magnitudes of vectors and
angles between vectors, we rarely need to use Lorentz
transformations to relate the components of 4-vectors in
different
reference frames. To simplify our lives, and focus on the most
useful things, I will probably completely skip any discussion
of Lorentz transformations!
4-vectors: Form a
four-component vector from a spatial vector vector and another
component, the timelike component.
The prototype 4-vector is a spacetime displacement ds = (dt, dx/c). The invariant interval
ds^2 = dt^2 - (dx.dx)/c^2
motivates
the definition of the Minkowsi inner ("dot") product:
ds^2 = ds.ds = (dt, dx).
(dt, dx) = dt^2
- (dx.dx)/c^2
More generally, we define 4-vector by A = (A_t, A), where A is a spatial vector and
A_t is a spatial scalar.
Given another 4-vector B = (B_t, B) we define the Minkowsi inner ("dot") product by
A.B = A_t B_t - A.B
For this formula to make sense the dimensions of A_t and A must be the same. (I'm
relenting here and changing my
convention compared to what I said in class.)
NOTE: There are
different conventions about 4-vectors. Taylor prefers to write
the spatial vector first, and he defines the
iner product with the opposite sign. That is, Taylor would write
A = (A, A_4), and for
him
A.B = A.B -
A_4 B_4 (15.50, Taylor)
energy-momentum 4-vector:
Probably the most useful 4-vector is the energy-momentum,
p = (E, p c)
NOTE: Tayor defines it
as p = (p, E/c) (15.75, Taylor).
The mass shell condition takes a neat form in terms of the
Minkowski inner product:
p^2 = p.p = (mc^2)^2
- The best way to handle the pesky factors of c is to
ignore them! We can always choose our unit of length to be c
times our
uit of time, and in such a system of units we have c = 1. If we
want to express things in some other system of units we can use
dimensional analysis to insert the appropriate factors of c
where they belong.
- photon + photon -> electron + positron makes the universe
opaque to high energy photons, because of collisions with
cosmic microwave background (CMB) photons, or infrared (IR)
background, depending on of far away the photon originates.
Energetics: the CMB has a temperature 2.7K. Note 1 eV/k = 11,600 K
(where k = Boltzmann's constant), so 1 K ~ 0.1 meV,
so the typical CMB photon energy is ~ 0.3 meV. Because of this pair
creation off the IR background we don't see photons above
about 50 TeV coming from farther than about 100 million light years
away.
Center of momentum (CM) frame:
Any collection of particles has some total 4-momentum P = p_1 + p_2
+ .... There is always
a reference frame in which the total 3-momentum vanishes, called the
center of momentum, or sometimes loosely, "center of mass"
frame. (The only exception is if all the particles are massless and
have parallel momenta.) The invariant square of the total 4-momentum
is equal to the square of the CM frame energy:
P.P = (E_cm)^2.
Threshold energy to create
particles: Suppose a moving particle with mass m_a collides
with a particle of m_b at rest. Can these particles
disappear and create just one particle with a mass M? The total four
momentum P = p_a + p_b is equal to the 4-momentum of the M particle,
which
satisfies P.P = M^2. Thus
M^2 = P.P = (p_a + p_b).(p_a + p_b) = p_a.p_a + p_b.p_b + 2 p_a.p_b
= m_a^2 + m_b^2 + 2 p_a.p_b
Let's suppose that m_b is at rest:
p_a = (E_a, p_a)
p_b = (m_b, 0)
so p_a.p_b = E_a m_b. Thus M^2 = m_a^2 + m_b^2 + 2 E_a m_b, or
E_a = (M^2 - m_a^2 - m_b^2)/2m_b
(multiply by c^2 to get the result in arbitrary units). Only if E_a
has precisely this value can m_a and m_b annihilate to make M.
Moreover, since E_a cannot be less than m_a, M must be greater than
or equal to m_a + m_b.
We can use this result to find the threshold energy to create a
collection of particles at rest with masses {m_i}: at the threshold,
all the final particles will be at rest with respect to each other
(minimum energy to create them), so to find this energy we can
just replace M in the previous calculation by the sum of the
particle masses, M -> ∑ m_i.
Head-on vs. fixed target collsions:
consider the case where the two colliding particles have mass m, so
the threshold energy is
E^th = (M^2 - 2m^2)/2m.
Compare this to the threshold energy for a head-on collision: M/2
per particle. If M >> m the ratio of threshold energies for
fixed target
vs. head-on is M/m.
Creating a Higgs
particle at the LHC:
At the Large Hadron Collider (LHC) there are head-on
proton-proton pp collisions, 3.5 TeV per proton currently.
Assuming no physics
beyond the Standard Model (SM), the Higgs mass is currently
constrained to lie in the range 115-140 GeV, or could possibly
but uncomfortably
be > 450 GeV. (Note however that theorists consider it a good
chance that ther is physics beyond the SM.) The dominant process
for making a Higgs particle in the SM is for a pair of gluons,
one from each proton, to collide and make a Higgs particle via
a top quark loop.
(Another contributor for example is when a quark and
antiquark annihilate to make a W boson, which then emits a Higgs
particle.)
If the gluons have equal energies that must be half the
Higgs mass, i.e. ~ 70 GeV. The proton as a whole has 50 times
more energy than this,
but the gluons inside the proton have only a fraction of the
total energy. If the collision had one proton at rest, then the
threshold energy to create
a Higgs particle with two protons would be ~ M_H^2/2m_p. The
proton mass is 938 MeV ~ 1 GeV, so the threshold would be ~
(140)^2/2 ~ 10 TeV.
As just explained however, it's not the whole proton, but only
constituent gluons that make the Higgs, and the gluons have only
a small fraction of
the total proton energy. The rest of the energy
goes into a pile of debris that is hard to makeout in general. I
think they have to wait for the
rare cases in which the debris is clean enough to let them identify
the Higgs by its characteristic decay patterns.
Compton scattering: I
covered this as in section 15.6 of the textbook. First we relate a
photon 4-momentum to the 4-wavevector p = hbar k = hbar(w, kc).
I used units with hbar = c =1. Calling the initial and final photon
4-momentum k0 and k, and the initial and final electron 4-momentum
p0 and p, we have
energy-momentum conservation:
k0 + p0 = k + p,
and mass shell conditions k0^2 = k^2 = 0, and p0^2 = p^2 = m_e^2.
We can rearrarange 4-momentum conservation as k0 - k = p - p0.
Taking the Minkowski dot product of each side with itself, and using
the mass-shell conditions,
we find
- 2 k0.k = 2m_e^2 - 2p0.p (*)
Now k0 = (w0, w0, 0, 0), k = (w, w costheta, wsintheta, 0), p0 =
(m_e, 0, 0, 0) and p = (E, p),
so
k0.k = w0 w (1 - costheta), and p0.p = m_e E = m_e(m_e + w_0 - w),
where the last step follows from energy conservation. Eqn (*) thus
yields
w0 w (1 - costheta) = m_e(w_0 - w), or
1/w - 1/w0 = (1 - costheta)/m_e
Using w = 2π/lambda and restoring the factors of hbar and c this
becomes
lambda - lambda0 = (h/(m_e c))(1 - costheta)
The largest energy transfer happens when the photon scatters
backward. Zero transfer happens in forward scattering.
The differential cross section depends on the photon polarizations.
Summing over final polarizations and averaging over initial
ones yields the formula shown here: http://en.wikipedia.org/wiki/Klein–Nishina_formula.
Tuesday, Nov. 1
- relativistic energy and
momentum
As explained Oct. 20, the relativistic action for a particle of
mass m is S = - mc^2 ∫ dtau = -
mc^2 ∫ dt √1-(dx/dt)^2/c^2 = ∫ L dt,
where the Lagrangian is defined by
L = - mc^2 √1-(dx/dt)^2/c^2.
The momentum conjugate to the veocity dx/dt is
p_x = ∂L/∂(dx/dt) = γ m dx/dt, where
the "gamma factor"
is defined by
γ = 1/√(1 - (v/c)^2).
Thus the relativistic definition of 3-momentum is
p = γ mv.
The energy can be computed as the value of the Hamiltonian, H =
v.(∂L/∂v) - L = γ
mv^2 + mc^2/γ =
γ mc^2(v^2/c^2
+ 1/γ^2) = γ mc^2,
E = γ mc^2.
While E depends of course on the reference system
(the "inertial observer"), the mass m has an invariant meaning,
namely, mc^2 is the
"rest energy", i.e. the energy in the rest frame of the particle.
The energy and momentum are related in a simple way:
E^2 - (|p|c)^2 = m^2 c^4
("mass shell formula")
Note that while the values of E and p depend on the reference system, the mass m can
always be computed from them using the mass shell
formula. This is closely analogous to the situation with the proper
time: while dt and dx depend
on the reference frame, the squared proper time
dtau^2 = dt^2 - (dx.dx)/c^2 has
an invariant meaning and can be computed from dt and dx in any reference frame.
We can take a limit m to zero and still have nonzero energy and
momentum if the speed v approaches c. Massless particles thus
satisfy
E = |p|c.
We can express velocity directly in terms of momentum and
energy:
v = p/(E/c^2).
- non-relativistic limit:
expand
γ = 1 + 1/2 (v/c)^2 + 3/8 (v/c)^4 + 5/16
(v/c)^6 + ...
so the expansion of the energy is
E = mc^2 + 1/2 mv^2 + 3/8 m v^4/c^2 + ...
At v = 0 there is only the rest
energy mc^2. The next term is the nonrelativistic
kinetic energy. The remaining terms are relativistic
corrections to the kinetic energy. The relativistic kinetic energy is defined as everything
but the rest energy, T = E - mc^2 = (γ - 1)mc^2.
- example
5.8 from textbook
- example (problem
15.60): a particle of mass m_a decays at rest to a pair of particles
of mass m_b. What is the speed of the final particles?
Apply energy and momentum conservation, and the mass shell
condition. The total momentum is initially zero so the final momenta
are
equal and opposite. Then the mass shell condition implies the final
energies are equal, and energy conservation implies the energy of
one
of the final particles is half the initial rest energy, E = 1/2 m_a
c^2. We can get the velocity by setting this equal to γ
m_b c^2, i.e.
γ = (m_a/2m_b). Solving for v yields v/c
= √1 - ((2m_b/m_a)^2. Alternatively, the mass
shell condition then gives us the magnitude of
the momentum, p = √(E/c)^2 - m^2 c^2, so the speed is given by v/c =
p/(E/c) = √1 - (mc^2/E)^2 = √1 - ((2m_b/m_a)^2.
Thursday, Oct. 27 - Exam
1
Tuesday, Oct. 25 - review
for Exam1
Thursday, Oct. 20
- proper time - in
SR, time is "arclength" along a timelike curve. That is, the
time between two events in itself is not
defined. Time is a proprty of a path in spacetime. This explains the twin
effect: the relative aging of the twins can differ
if they travel different paths. I emphasized the analogy with
path length in Euclidean geometry.
- spacetime interval -
The interval is what determines times and lengths and the
lightcone, as well as the inertial motions.
Logically, one should just postulate it, and derive
consequences. But we can also motivate it and its properties, by
just appealing
to the postulates of relativity and applying them to what are
assumed to be inertial motions, i.e. straight timelike paths in
spacetime.
We also call these "observers". Consider two obervers O1 and O2
who pass through the same event E and are moving relative
to either other. Let the zero of time correspond to the event E
for both O1 and O2. At time t1 from E along his worldline,
O1 sends
a light pulse to O2. The pulse is received at event F at time t0
on O2's worldline, and the reflected pulse arrives back at O1 at
t2.
Then t0/t1=t2/t0, because each pair of times is defined by a
similar experiment: same relative motion, events conected by a
light pulse.
Thus the "radar relation" between the time measurements of O1
and O2 is
t0^2 = t1 t2. (*)
O1 would define the "time separation" Dt of the events E and
F to be the time halfway in between t1 and t2, i.e. Dt =
(t1+t2)/2. Similarly,
O1 would define the "distance" Dx from himself to F by the light
travel time (t2-t1)/2 times the speed of light c, i.e. Dx
= c(t2-t1)/2.
We can invert these definitions to find t1 = Dt - Dx/c and t2 =
Dt + Dx/c, so (*) implies
t0^2 = Dt^2 - (Dx/c)^2. (**)
This shows that the proper time t0 of O2 along the straight path
from E to F can be expressed in terms of the Dt and Dx
coordinate increments
conventionally defind by O1 by a kind of Pythagorean theorem.
Another observer O3 would define different coordinate increments
Dt' and Dx',
but would get the same combination for the rhs of (**),
i.e. Dt'^2 - (Dx'/c)^2 = Dt^2
- (Dx/c)^2, because they are both is
equal to the square of
O2's proper time, t0^2. This invariant quantity is called the
"(squared) spacetime interval".
Sometimes the spacetime interval is just called the "interval",
and sometimes the "invariant interval". Sometimes it is
defined with the opposite sign,
and sometimes multiplied by c^2 (hence given in length rather
than time units), or both. For timelike displacements the
squared interval is positive
as I've defined it, while is negative for spacelike
displacements and zero for lightlike ones.
O1 would define the velocity
of O2 as v = Dx/Dt. In terms of v, the square root of (**)
becomes
t0 = Dt √1- (v/c)^2,
which is the famous relativistic
time dilation formula: the proper time t0 measured by O2
along his own path is shorter than the time Dt assigned
to that path by O2.
- The interval is zero on a piecewise lightlike path that
connects two events. The path of longest time is the inertial
motion (straight line).
- The proper time along an arbitrary path is
the integral of the proper time increment dtau:
proper time = ∫ dtau = ∫ dt
√dt^2-(dx/c)^2 = ∫ dt
√1-(dx/dt)^2/c^2.
We imposed the condition that the variation of the propert time
is zero when the path is varied. This should be satisfied at the
inertial path,
since that maximizes the proper time. Using the Euler-Lagrange
equation, we showed that indeed a constant velocity path
satisfies this maximum time condition.
- We took a nonrelativistic limit to understand the relation
between the proper time and the non-relativistic action.
Expanding in powers of v/c, the proper time
along a path is
proper time = ∫ dt √1-v^2/c^2 = ∫ dt (1- 1/2 v^2/c^2 - 1/8
v^4/c^4 + ...).
If this is multiplied by -mc^2 we get (-mc^2) ∫ dtau = ∫ (-mc^2
+ 1/2 mv^2 + 1/8 m v^4/c^2 + ...). So we see that
the -mc^2 times the proper time gives
a relativistic generalization of the
action. The rest energy mc^2 acts like a constant potential
energy. The second term of the integrand is the nonrelativistic
kinetic energy.
Tuesday, Oct. 18
- Reviewed coupled oscillators and how to solve for the
normal modes and frequencies using the matrix method.
- Discussed the oscillating systems that appear in hw7:
(CO2 vibrations, masses suspended by springs, physical pendulum, physical penulum hanging from a
string)
- physical pendulum: Lagrangian, in terms of the moment of
inertia about the rotation axis.
D2-13
RACING PENDULA example.
- parallel axis theorem for moment of inertia. I showed that this is
directly related to the decomposition of kinetic
energy into T = T_cm + T_rel. That is, For a rigid body rotating
about a fixed axis, T = 1/2 I_axis thetadot^2,
while T_rel = 1/2 I_cm thetadot^2 and T_cm = 1/2 M R_cm^2
thetadot^2. Here I_axis and I_cm are the moments
of inertia about the axis of rotation and about a parallel axis
through the center of mass. The equality of these two
representations of the kinetic energy implies I_axis = I_cm + M
R_cm^2, the parallel axis theorem.
- special relativity: To
write the Lagrangian or Newton's second law we use certain
structures that are assumed
present in spacetime in order to define velocity, speed, and the
action:
1) absolute time function t, 2) metric of spatial distance at one
time, 3) family of intertial frames.
(Newton replaced 3) by an absolute standard of rest, but Newtonian
physics only depends on the family
of inertial frames, not on which one of those frames is used as the
standard of rest.) In special relativity, all of these
structures are unified into one, the spacetime interval. Before we
get to the quantitative aspects of relativity, let's
discuss the qualitative aspects...
The key fact giving rise to special relativity theory, historically,
is that the speed of light as described by electrodynamics,
and measured by experiments, does not depend on the speed of the
source, nor on the speed of the observer. [More
generally, the symmetry group of Maxwell's equations is not the
Galilean group, but the Lorentz group.] This means
that the paths followed by light rays in spacetime trace out an
absolute structure that is a property of spacetime.
This can be visualized as a lightcone at each spacetime event.
Instead of an absolute time slicing of spacetime like
in Newtonian physics, we have an absolute family of light cones. At
an event p, the inside of one half of the lightcone
is the future, the inside
of the other half is the past,
and the rest is the elsewhere.
Points in the future or past of p are
timelike related to p,
points in the elsewhere are spacelike
related to p, and points on the cone are lightlike related.
The point p can only be influenced by events inside on on its past
lightcone, and can only influence events inside
or on its future lightcone. So the lightcones define the causal
structure of spacetime. [In Newtonian physics, the causal
structure is defined by the absolute time function.]
In Newtonian spacetime events at the same absolute time are simultaneous. In relativity,
there is no absolute meaning
of simultaneity. A given observer can use radar to to define a notion of
simultaneity, but that notion will depend on the
observer. Spacelike related points are always "simultaneous" as
defined by some observers and not by others.
Timelike or lightlike related points are never simultaneous as
defined by any observer.
Diagrams
illustrating the relativity of simultaneity, and contrasting
Newtonian and relativistic spacetimes.
Thursday, Oct. 13
Prof. Chacko covered the material in sections 11.1,2,4 of
the textbook.
Tuesday, Oct. 11
- Perturbations of Mercury's orbit: solar oblateness, other
planets. Apparently you can treat the planet as if it were a
ring
of matter, to simplify the problem. I explained why the
potential has a maximum in the center of the ring so it's like a
-ar^2 potential to the first approximation. (For a nice but
somewhat complicated explanation of this method see
http://www.mathpages.com/home/kmath280/kmath280.htm.
I don't know exactly how to fully justify the ring
approximation,
but it seems plausible.)
- Le
Verrier computed the planetary contributions (I think by
this ring method) and they add to around 527 arcseconds per
century.
The GR correction is 43 arcseconds. Le Verrier suggested the
extra 43 arseconds might be due to a planet Vulcan
in orbit between
Mercury and the sun (in class I incorrectly said it might be
like an earth orbit, behind the sun).
- Dark
matter: explained briefly a bunch of evidence for dark
matter, and its properties. One example was the famous
bullet cluster
of galaxies. (See also the Wikipedia article.)
- Tides: Finished discussing tides. Explained that the
surface of the ocean should be an equipotential surface of the
combined
gravitational and tidal potentials, and this this can be used to
determine the height of ideal tides on an ocean covered earth
(see
textbook for details).
- Rotating frame of reference: showed Rotating
reference frame: movie, then wrote down the Lagrangian for
free particle
motion in a plane as described in a uniformly rotating frame of
reference. phi_in = phi_rot + Omega t, where Omega is the angular
velocity, so phido_in = phidot_rot + Omega. Insert this into the
kinetic energy to find the Lagrangian
L = 1/2 m rdot2 + m r^2 Omega phidot + 1/2 m r^2 Omega^2
The second term is the velocity dependent Coriolis potential, and
the third term is minus the centrifugal potential.
The Coriois potential is exactly what you'd get for a uniform
magnetic field perpendicular to the plane, and the centrifugal
potential is an unpside down oscillator potential.
Rotating
water tank & parabolic surface: movie shows that the
surface of water in a rotating tank assumes a
parabolic form.
We can understand this as for the surface of the oceean
tides: the surface must be an equipotential surface of the
combined
gravitational and centrifugal potentials. (The only other force,
water pressure, is normal to the surface.) Thus
mgh - 1/2 mr^2 Omega^2 = const, i.e. h = (Omega^2/2g)r^2.
- 3d Coriolis and centrifugal forces: explained the nature of
eqn (9.34) but did not derive it. (I suggest you go through the
derivation
in the book, and ask me if you have questions.)
- Lagrange
points: explained why these stationary points exist for
test masses, and discussed their stability properties. L4 and L5
are
actually the top of the hill of the velocity independent part of
the (combined gravitational and centrifugal) potential, but the
Coriolis
force stabilizes motion around them, provided the ratio of the
mass of the sun to the mass of the earth (or other planet) is
greater than
about 25, which it certainly is. The location of L1,2,3 are
easily found using standard force balance in Newtonian
mechanics; I haven't
tried to fnd the location of L4 and L5 this way but I suppose
it's also pretty straightforward. The analysis of the stability,
being concerned
with time-dependent motion, is (or so I hear) easier to carry
out in the rotating frame. For a detailed discussion of all this
there are some
nice
notes by Neil Cornish.
Thursday, Oct. 6
- In general relativity there is, in
addition to the Newtonian terms -a/r + b/r^2, a term -d/r^3 in
the effective radial potential
for orbits arounda central mass. Here a = GMm, b = l^2/(2m), and
d = b r_g, where r_g = 2GM/c^2 is the
"gravitational radius"
or "Schwarzschild radius" (for M = M_sun the gravitational radius is
3 km), and c is the speed of light. The ratio of the relativistic
term to the centrifugal barrier is r_g/r, which is tiny for a normal
star, but can approach unity for a neutron star or black hole.
In general relativity this potential governs the radial velocity
dr/ds, where ds is the proper time of the planet, and r is the
of the circumferential radius C/2π.
For Mercury's orbit around the sun the -d/r^3 term produces a very
small contribution to the perihelion precession, the
famous 43 seconds of arc per centrury. (1 second = 1/3600 degree.)
For orbits close to a black hole the -d/r^3 term dominates, so there
are no stable circular orbits very close to the black hole.
The innermost stable (actually marginally stable) circular orbit is
called the "ISCO". The accretion disk around a black hole
has an inner edge at the ISCO. For spinning black holes the ISCO is
closer to the black hole the higher the spin is. For a
maximally spinning black hole the ISCO coincides with the event
horizon. This dependence of the ISCO on the spin
of the black hole is used to observe the spin: a spectral line
emitted by iron atoms in the accretion disk is observed. The
the line suffers Doppler redhift, as well as gravitational redshift.
The maximum redshift is determined by the mass of the
black hole and how close to the horizon the radiation is emitted. It
also depends on the inclination of the disk to the line
of sight, whcih cannot be directly observed, but can be extracted
from the maximum blueshifted part of the line, which is
Doppler shifted by motion towards the observer, and is largely
independent of the black hole spin.
- Showed that Kepler's 2nd law
(equal areas swept out in equal times) is equivalent to angular
momentum conservation.
- noninertial frames:
Explained as in the textbook. If the acceleration of the frame
is A, Newton's law for
a mass m in that
frame includes an inertial
force -mA. This
is also sometimes called a ficticious
force, or a pseudo-force.
- How to spot an inertial force: it is proportional to the mass
of the particle. (Note there is another kind of force that has
this
propertty: gravity! Einstein took this to mean that gravity is
actually not a real force but an inertial force...more on this
later.)
- vertically accelerating elevator example.
- horizontally accelerating car example as in book.
- Tides: The change in
strength and direction of the moons force over the surface of
the earth produces the tides.
The high tides due to the moon are around midnight and noon at a
new moon or full moon, and around sunrise and
sunset for a 1/4 or 3/4 moon. The sun contributes about 1/2 as
much as the moon to the tides on earth. When the sun
and moon are aligned, at new moon or full moon, the tides are
larger, and are called spring
tides. When the moon is
at 1/4 or 3/4 phase, the tides are smaller, and are called neap tides. The tidal bulge
actually is actually afew degrees
ahead of the moon in the direction of the earth's rotation. I
think this is due to the lag of the response of the ocean to
the changing moon force in the earth centered reference frame.
Details of tides depend of course on the local flow
features induced by the presence of land forms.
- Computation of tidal force, as in textbook. The tidal force is the
difference between the lunar force at a point on the surface
of the earth and the lunar force at the center. Ended writing
the tidal potential
from which the tidal force can be computed
by taking minus the gradient.
Tuesday, Oct. 4
- discussed some of the hw problems a bit
- reviewed the reduction of the 2-body problem to one body in a
1d effective potential
- derived the elliptical orbit shape
- discussed Kepler's 3rd law period^2 = [(4π)^2/GM](semimajor
axis)^2. I expressed my puzzlement that this relation is
independent of
the ellipticity of the orbit. There has to be a deep reason for
this.
- Closed orbits: They are closed in general only for 1/r^2 force
and harmonic oscillator. Perturbations from oblateness of the
sun, or from Jupiter,
or from the general relativity correction, can make the orbits
slightly not closed, so they precess.
We discussed another way to show that the orbits are closed, in
the approximation of small ellipticity. This method will allow
the small
precession rate to be computed when the potential is perturbed.
The method is to compare the frequency of radial oscillation
with the frequency
of angular oscillation. For an effective potential of the form
U_eff = a/r^2 - b/r,
there is a circular orbit at U_eff' = 0, i.e. r = r_0 = 2a/b.
The radial oscillation frequency is omega_r =
sqrt[U_eff''(r_0)/µ]. Now U_eff'' = 6a/r^4 -2b/r^3
= (2/r^4)(3a - br),
so U_eff''(r_0) = 2a/r_0^4, and omega_r =
sqrt[2a/(µr_0^4)]. On the other hand, the angular
frequency can be expressed in terms of the angular
momentum as omega_phi = phidot = p_phi/mr^2. If the 1/r^2 term
comes completely from the centrifugal barrier, then a =
p_phi^2/(2µ), so the
two frequencies agree. Otherwise they differ.
- L_tot = L_cm + L_rel, where L is the angular momentum. Applied
this to see that in terms of the reduced mass µ and the
separation vector r,
the angular momentum relative to the center of mass is L
= µ r x rdot, whose magnitude is
µ r^2 phidot, so this is in fact the same as the conserved
quantity p_phi = ∂L/∂phidot.
Thursday, Sept. 29
- comments about soap film problem, the unstable solution, and
the critial separation
- comments about the catenary problem
- overview of 2 body problem:
= reduction to free particle motion of center of mass, and
effective one body problem of motion relative to the
center of mass
= for central forces, angular momentum conservation solves
the angular problem, reducing to an effective 1d problem in an
effective potential
- dedfinition and properties of the center or mass and position
and velocity relative to the center of mass
- T = T_cm + T_rel
- 2 body problem, Lagrangian and effective potential for the
relative motion
- qualititative properties of orbits
- equation for the shape of the orbit in terms of u(phi), where
u = 1/r, and r is the separation of the bodies, and phi is the
angle of their separation vector.
We ended at equation (8.45). Several things were derived and/or
explained somewhat differently from inthe book.
Tuesday, Sept. 27
- ambiguity of Lagrangian under addition of (d/dt)f(q,t):
clarified why f must not depend on derivatives of q.
(See last Thursday's notes for more details).
- gauge invariance of electromagnetic part of Lagrangian: showed
that both the -V and v.A terms are needed together,
and with exactly the relative coefficient -V
+ v.A, in order for a gauge
transformation to just produce a total time derivative.
(See last Thursday's notes for more
details).
- Lagrange equations for charged particle in electromagnetic
(em) field: showed how the em term q(-V
+ v.A) produces
the Lorentz force law. I did this using an index notation, with
Cartesian coordinates, because it's good to learn about
index notation. (I neglected to emphasize at the beginning that
I was using Cartesian coordinates. We can easily
generalize the method to arbitrary coordinates - we'll to that
later.)
- Lagrange multipliers:
This is more complicated, so I've also
prepared a latex version of Lagrange multipliers and constraints you
might prefer.
Start with multivariable calculus: suppose f(x,y,z) is
constant on the z = 0 surface. Then although
we can't say that grad f = 0 when z = 0, we can say grad f =
lambda zhat when z=0. OK, I have an html problem here with
notation.
Let me use df for the gradient of f, and w for the Lagrange
multiplier, so the last equation would be written df = w zhat.
Now let's generalize this example to consider a function that is
constant on a surface defined by a constraint equation
C(x,y,z) = 0. Then df must be parallel to dC when C = 0. Put
differently,
df = w dC when C = 0, for some function w.
In the example C = z, so dC = zhat, and this agrees with what we
just said above.
Another way to see that this is the right condition is to take
the dot product with an arbitrary vector v, which gives
v.df = w v.dC. If v is tangent to the
constraint surface then v.dC = 0, so in that case
the equation implies v.df = 0, i.e.
the rate of change of f along the directions that lie in the
surface is zero. For v
that is not tangent to
the surface, f can change.
Now what if there are two constraints? For example C1
= z and C2 = x2 + y2
+ z2
- R2.
So C1 =
C2 = 0
implies the point
is both on the z = 0
plane and on the
sphere of radius R. That is, it lies on the circle of radius R
in the xy plane, centered on the
origin. The gradient of a function that is constant on this
circle must satisfy df = w1 dC1 + w2
dC2 when C1 =
C2 = 0. This is
equivalent to saying that the derivative of f in any direction
tangent to both constraint surfaces is zero.
One more formal point before applying this to Lagrangians:
Instead of writing df = w dC we can equally well write
df = d(wC), because d(wC)= w dC + C dw, and when C = 0 the
second term vanishes. So the condition on f can also be
written as d(f - wC)=0 when C = 0. Since w is undetermined at
this stage anyway, we can also flip the sign and write this
condition as
d(f + wC)=0 when C = 0.
If we have two constraints, the condition can be written as d(f
+ w1C1 + w2C2)
= 0 when C1 = C2
= 0.
The generalization to any number of constraints is obvious.
- Lagrange multipliers and
mechanics:
Let's illustrate how this applies to constrained mechanics with
an example. Cconsider the
simple pendulum of length R. We've seen we can just impose the
constraint r = R from the beginning,
using the angle theta as our
sole generalized coordinate. This is equivalent to just
demanding that the action be stationary with respect to
variations of the path
(r(t), theta(t)) that respect, for each time t, the
constraint C(t) = r(t) - R = 0.
This constrained variational principle on the action functional
S[r(t),theta(t)] is just like what was discussed above for
functions.
Instead of one or two constraints however we have an infinite
number of constraints C(t) = 0, one for each t. If we add them
all to S,
multiplied by a Lagrange multiplier function w(t) and
integrating over t, we arrive at an equivalent, but
unconstrained variational
principle: the variation of S + ∫ w(t)C(t) dt should be zero for
any variation, when
C(t) = 0 holds. Or, in terms of the Lagrangian, the
variation of
∫ (L + wC) dt
must vanish (the t-dependence of w and C is not explicitly
indicated but it's there).
So in the end it's quite simple: we just add to the Lagrangian
an arbitrary multiple of the constraint(s).
For the pendulum, the theta equation
is unchanged, but now that r is not fixed a priori we get an r
equation
of motion. The action is the integral of L + wC = 1/2 m
rdot^2 + 1/2 m r^2 thetadot^2 + mgr cos(theta) + w(r - R), so
the r equation is
m rddot = mr thetadot^2 + mg cos(theta) + w,
where the w term comes from ∂(wC)/∂r when C = 0. Recall that
this is supposed to hold only when the constraint C = r - R = 0
holds,
so it is really the condition
0 = mR thetadot^2 + mg cos(theta) + w.
Since w is so far an arbitrary function this doesn't impose any
condition on anything else, of course. In fact, we can solve
this equation for w,
w = - mR thetadot^2 - mg cos(theta).
- Forces of constraint:
What is the meaning of w? It's whatever it must be for the r
equation of motion to be satisfied when r is fixed at r = R. So
w must be closely
related to the force of tension of the string. In fact, in this
case, it is exactly the tension force, as we can see with a
Newtonian calculation:
the force in the radial direction is the radial component
of the gravitational force minus the tension: mg cos(theta) - T,
where T is the magnitude
of the tension force. The radial acceleration is the centripetal
acceleration - R thetadot^2. The radial component of F = ma then
yields
T = mg cos(theta) + mR thetadot^2. Hence w = -T. The minus sign is
because this force is in the negative rhat direction.
What is the general relation between the Lagrange multiplier w(t)
and the force of constraint? The answer is simple: whatever the wC
term
produces in the equation of motion, that is the generalized force
for the corresponding generalized coordinate. That is, w ∂C/∂q is
the generalized
force. In the pendulum example, C = r - R, and the coordinate is r,
so dC/dr = 1, and w is just the constraint force in the r direction.
If the
constrained coordinate q had been an angle, w ∂C/∂q would be the
torque of constraint. If q is some more unusual generalized
coordinate,
then we'd just have some unusual generalized force of constraint.
[If C depends on time derivatives, then in general things are
trickier
(non-holonomic constraints), but if the constraint can be used
to eliminate a coordinate it is more or less the same.]
Thursday, Sept. 22
Free particle at rest: v = 0 path has the minimum action, S
= 0.
Freely falling particle in uniform gravitational field: minimum
action negative, from up and down motion.
If particle goes up a height h, both v and U scale proportional
to h, but T scales as h^2. So for small enough
h, the Lagrangian T - U will be negative. The h that gives
minimum for constant velocity up and down happens
to be the same as the h that gives the height of the classical
path. (Can you find an argument showing that this
must be the case?)
If you bring in circular orbits then, for a sufficiently long
time interval, there is a second path, the circular orbit.
The action on that path is a saddle point of the action, not the
minimum.
Ambiguity of the Lagrangian:
You can add a total time derivative without changing the
equations of motion,
because the action for L + df/dt is the action for L plus
[f(t_2) - f(t_1)]. With fixed endpoints, these actions differ
by a constant (asuuming f = f(q,t) depends on q and t but not on
time derivatives of q), so they have the same
stationary points. A nice example is in the homework, of the
pendulum in an accelerating elevator.
Change of inertial frame
(Galilean transformation): What is the change of the
action when you change
inertial reference frames? The definition of kinetic energy
changes: the velocity wrt the new frame is v' = v - v_0,
where v_0 is the velocity of the new frame wrt the old one. The
kinetic energy in the new frame is therefore
1/2 mv'2 = 1/2 m v2 - mv_0 v + 1/2 m v_02.
The difference of the two definitions of kinetic energy is a
total time derivative: T' = T + df/dt, with
f = (-mv_0 x(t) + 1/2 mv_0^2 t). The definition of potential
energy doesn't change since it is just a function U(x,t)
of position in space and time, which makes no reference to a
particular frame. (Of course the formula for it
would look different when written using the new coordinate.) So
the Lagrangian changes by a total time
derivative, so the action changes by a constant, for fixed
endpoints.
Using this we can argue that the free particle motion at
constant velocity minimizes the action: go into the
reference frame where the velocity is zero, where clearly the
action is minimized.
Electromagnetic force:
Lorentz force law: F =
q(E + v x B).
For electrostatic fields we have E = - grad V, and the electrostatic potential
energy of a charge is qV,
which can be used in the Lagrangian to get the equation of
motion. But if the electric field has a part
that is induced by a changing magnetic field, then E is not the gradient of a
scalar. Moreover, if there
is even a static magnetic field, how do we handle that?
I explained how Faraday's law, curl E = - ∂tB, and the absence of magnetic poles, div B = 0, imply that
there exists a scalar potential V and vector potential A such that B = curl A and E = - grad V - ∂tA.
The potentials are not unique: one can make the gauge transformation to new
potentials
A' = A +
grad f, V' = V - ∂tf
which yield exactly the same B and E.
This is called gauge invariance of the
fields.
Now, what about the Lagrangian? There are many conditions
to be satisfied.
The electromagnetic term should be
1) a scalar - the action is a scalar
2) linear in the potentials - since the Lorentz force is linear
in the fields
3) gauge invariant - since the equation of motion involves only
the fields, not the potentials
We can guess there is a term like in the
electrostatic case, -qV. This is a scalar and linear in V.
It is not gauge invariant, however, since V changes by
∂tf. If this were a total
time derivative with respect to t it
would not change the equations of motion, but it is only the partial derivative. So this
can't be the whole story,
because the Lagrangian is not gauge invariant, even up to a total
time derivative. But we haven't finished.
There is also the vector potential. It's a vector, so to make a
scalar that is linear in the vector potential we need
to form its dot product with another vector. To maintain linearity,
that other vector should be independent of the
potentials. There is only one such vector available: the particle
velocity!
So we guess that the term we need is proportional to v.A.
Now what about the third criterion, gauge invariance? Under a gauge
transformation, v.A changes by
v.grad f. Since v = dx/dt, this looks like a time derivative, v.grad f = df/dt, but that's not
quite right!
The t dependence of f(x(t),t)
comes in both via x(t) and
through explicit time dependence, and v.grad f
picks up only the former. It doesn't include the explicit time
dependence. But remember that the gauge change of the
scalar potential term involves only the explicit time dependence.
So, taken together, the scalar and vector
terms are gauge invariant if we add them in the combination v.A - V. Under a gauge transformation this
combination
changes by the total time
derivative df/dt! So to satisfy the three conditions above, we seem
to have
no choice but to define the electromagnetic part of the Lagrangian
as L_em = q(v.A -V).
Tuesday, Sept. 20
Spherical pendulum again:
how to set up the problem if there is motion in both the theta
and phi directions.
Write out both equations of motion. The phi equation will be the
the angular momentum conservation law,
and enables one to solve for phidot in terms of the conjugate
momentum p_phi and theta. Then this can be used
to eliminate phidot from the theta equation, reducing the theta
motion to a one dimensional problem with
an effectve potential U_eff(theta). Important note: you cannot substitute for phidot in terms of p_phi
in the
Lagrangian before finding the theta equation. This would
introduce theta dependence that is different from
what was in the Lagrangian. It's incorrect, because this extra
theta dependence comes from the relation between
phidot and p_phi, treating the arbitrary conserved p_phi as a
constant.
- small oscillations of the spherical pendulum: We showed before
that for any fixed theta_0 there is a circular
motion, with some associated angular momentum. Now you can
perturb that motion to introduce an oscillation,
whose frequency will be determined by w^2 = (U_eff)''(theta_0).
Spinning hoop: made
several points about this.
1) The mass drops out of the equations of motion. It affects the
forces of constraint, but as the Lagrangian is proportional
to m, not the equations of motion. This derives from the fact
that both the inertia and the force of gravity are proportional
to m. This is of course a special property of gravity.
2) We can choose units with m = g = R = 1. This simplifies the
equations, but you loose the ability to check your
algebra with dimensional analysis. You put the m, g, R back in
at the end using dimensional analysis.
3) Went over the solution of the problem of small oscillations
about the equilibrium points in detail. Showed how the
evaluation of (U_eff)''(theta_0) is
simplified by writing (U_eff)'(theta) as a product of factors,
one of which vanishes
at each equilibrium point. Only the derivative of the latter
factor survives when
evaluating (U_eff)''(theta_0).
Conservation of energy:
momentum and angular momentum conservation derive from space
translation and
rotation symmetry respectively. Energy conservation arises from
time translation symmetry. We derived the conserved
quantitity that arises from time translation symmetry of the
Lagrangian. If there is no explicit t dependence in L, then
the "Hamiltonian", H = p_i qdot^i - L, is conserved. Here the
index i appears twice, once on p_i and once on qdot^i.
We use the Einstein summation convention according to which
reapeated indices appearing in the same term (i.e. on
multiplied objects) are summed over all their values. What is
the meaning of H? For a Lagrangian of the form
L = 1/2 A_ij(q) qdot^i qdot^j - U(q) we find H =
1/2 A_ij(q) qdot^i qdot^j + U(q). So if the kinetic energy is
T = 1/2 A_ij(q) qdot^i qdot^j, then H =
T + U is the total mechanical energy.
Index gymnastics: In
deriving the form of H in the previous paragraph, we went
through some index gymnastics.
I will write some latex notes about this.
We considered a relatively simple example where H is not the total mechanical
energy: the bead sliding on a
hoop driven by an external torque to rotate at constant angular
frequency omega. The Lagrangian is
L = 1/2 m R^2 thetadot^2 + 1/2 m R^2 sin^2(theta) omega^2 -
mgR(1-cos(theta)). The second term is the azimuthal
part of the kinetic energy, but it contains no time derivatives of
the generalized coordinate theta, so shows up as a
contribution to the effectve potential U_eff(theta). This means that
H is not the total mechanical energy, but rather
the total mechanical energy minus twice the azimuthal kinetic
energy. It makes sense that mechanical energy is
not conserved, since the driver of the rotation of the hoop puts
energy into the particle motion. And the orientation of the
constraint forces is imposed by external time dependence, so the
system really has time dependence, even though
the Lagrangian for the generalized coordinate does not. Also,
angular momentum is not conserved, since the hoop
at each instant is an external constraint that violates rotational
invariance. So what is H, this conserved quantity.
Is there a symmetry that it corresponds to??
Thursday, Sept. 15
- What is action? For a free particle motion the action is
S =∫ 1/2 mv2 dt, which is the average kinetic energy
times the total time interval. On the classical path (solution
to the equation of motion) v = v0 = const. We
can easily show this is the minimum for all paths. In the
presence of a potential, the action is still a minimum
on the classical path, provided the two times are close enough.
For a harmonic oscillator, "short enough" means
less than half the period.
- Can change variables freely in describing the configuration of
the system. Example: change from x1 and x2 to
x_cm and x_rel. (See this week's homework.)
- Constraints: Example
of pendulum: can move in theta and phi, but not r. The r degree
of freedom is constrained.
We can just leave it out of the Lagrangian, as the contraint
ensures that the eqn of motion for it is satisfied.
Lagrangian for this pendulum in terms of theta and phi.
Considered two cases: planar motion (phi = const) and
circular motion (theta = const). phi doesn't appear in the
Lagrangian, it is an "ignorable
coordinate", i.e.
phi translation is a symmetry. Correspondingly, ∂L/∂phidot, the
"generalized momentum
conjugate to phi", is conserved.
This is nothing but the angular momentum about the vertical
axis. Showed how to solve the same problem with
Newton's second law in vector form, which involves the unknown
tension that must be eliminated. The Lagrangian
method never introduces the tension in the first place.
- Planar pendulum in harmonic oscillator approximation: expand
sin(theta) = theta - 1/6 theta^3 + ... and drop all but the
linear term to get the harmonic oscillator eqn. The correction
has relative size 1/6 theta^2, which for theta = π/4 (45˚)
is only about 0.1, i.e. it's a 10% correction.
- Circular pendulum: angular frequency is √g/(l cos(theta)). At
theta = 0 this is the same as for the planar penulum,
which makes sense because the circular oscillation is the
superposition of two planar oscillations, a quarter cycle
out of phase. As theta approaches π/2 this goes to infinity,
which makes sense because the tension must go to infinity
in order for the vertical component of the tension force to
balance the vertical gravitational force.
- Pendulum with sliding pivot point: consider a standard planar
pendulum, but with the pivot point at the top free
to slide int he horizontal direction. Then the configuration is
described by two coordinates, e.g. the horizontal
position of the pivot point and the angle of th pendulum from
the vertical. We wrote out the Lagrangian for this
system.
- Extended bodies: can think of this as a huge number of
particles, constrained by atomic forces so that the whole
system has only a few degrees of freedom. As an example I
considered a "physical pendulum", i.e. a solid body
pivoting around a fixed axis in a gravitational field. The
kinetic energy can be written as a sum over all the mass
elements
of the body, T = ∑ 1/2 m_i v_i^2. If r_i is the distance of the
i^th mass element from the axis, its speed is r_i w (where
w stands for "omega" which is a pain to type in html). So T =
1/2 I w^2, where I = ∑ m_i r_i^2 is the moment of inertia.
Similarly, the potential energy can be written as a sum U
= ∑ m_i g y_i, where y_i is the vertical component of the
position
vector of the i^th mass element. Now ∑ m_i y_i = M y_cm, where M
is the total mass and y_cm is the vertical component
of the center of mass position. Moreover, y_cm =
L(1-cos(theta)), where l is the distance from the axis to the
center of mass.
So the Lagrangian for the pendulum is L = 1/2 I w^2 + MgL(1 -
cos(theta)).
- Did I leave anything out?
Tuesday, Sept. 13
- Euler-Lagrange
equations: I explained the nature of a "functional" and
what it means for that to be
stationary with respect to variations of the function(s) that
form its argument. As an alternative to the
method described in the book, I re-derived the Euler-Lagrange
equations without introducing any particular
path variation eta.
- Example of the length of a curve in the Euclidean plane. We
solved this three ways:
1) paths y(x) [could instead take x(y)]
2) parametrized paths x(t), y(t)
3) parametrized paths r(t), theta(t)
using the E-L equations. In the second case, we noted that the path
parameter has not been specified, so there is
no reason why xdot(t) and ydot(t) should be constant. But we found
that xdot(t)/ydot(t) is constant, which implies
that dx/dy (or dy/dx) is constant. In the 3rd case, the eqns are
complicated, but if we use the translation symmetry
to place the origin of the coordinate system on the curve, we see
that the theta equation implies thetadot=0, which
is certainly the description of a straight line through the origin.
- Mechanics: Pulled out of
a hat the definition of the Lagrangian, L = T - U, and the "action",
also called "Hamilton's principal
function", S =∫ L dt. Showed that for a particle in 1d the conditon
that S be stationary under all path variations that
vanish at the
endpoints is equivalent to Newton's second law. This is called
"Hamilton's principle". Then generalized this to a particle in
3d,
then to two particles in 3d interacting with each other via a
potential. It generalizes to any number of particles.
- It's quite remarkable that the vector equations of a system of
a system of particles all come from Hamilton's principle, which
refers to the variation of the integral of a scalar. Adding more
particles or dimensions increases the number of functions that
the action depends on, but it's still the integral of a scalar.
- Although it looks arbitrary at first, the action approach is
actually the deeper approach to mechanics. It is via the action
that
the role of symmetries is best appreciated, and the action
approach also governs relativistic mechanics, and also field
theory.
For example Maxwell's equations and even Einstein's field
equations of gravitation are all goverened by an action
principle.
- The significance of the action and Hamilton's principle can be
understood from the viewpoint of quantum mechanics.
In Feynman's path integral formulation, each path is assigned
the amplitude exp(iS/hbar), where hbar is Planck's constant.
(It only makes sense to exponentiate a
dimensionless quantity. S has
dimensions of action = energy x time = momentum x length,
the same as hbar.) The total amplitude is the sum over all
paths. Destructive interference occurs when the action of two
paths
differs by something comparable to hbar or greater. This is how
hbar sets the scale of quantum effects. At the classical path,
the variation of S vanishes, so nearby paths interfere
constructively. In the classical limit, the path is thus
determined by the
condition that S be stationary. You can read about this in
the Feynman lectures, for instance.
Thursday, Sept. 8
Prof. Shawhan lectured. His notes:
http://www2.physics.umd.edu/~pshawhan/courses/phys410/sub/PHYS410_Sept8.pdf
He covered Chapter 6, Calculus of Variations, and applied it to
the brachistochrone problem:
what shape track will get a falling particle from one point to
another in the shortest time?
Tuesday, Sept. 6
Prof. Shawhan lectured. His notes:
http://www2.physics.umd.edu/~pshawhan/courses/phys410/sub/PHYS410_Sept6.pdf
He covered use of energy conservation to solve mechanics
problems with one degree of freedom
(find motion, time for a given process, etc), Coulomb force and
potential between a pair of particles,
and introduced the idea of generalized coordinates and forces.
Thursday, Sept. 1
- Intro to the class, syllabus, website, homework 0, piazza, email,
etc.
- Chapter 1 material:
- kinematics of motion in Euclidean
space and Newtonian time
- inertial frames, Newton's second law
- Chapter 4 material:
- Work, kinetic energy, work-kinetic
energy theorem, power
- Potential energy for one or two particles, total mechanical
energy
DEMO: D3-01
MASSES
SLIDING ON ROTATING CROSSARM
Introduced potential energy by considering forces that are (minus)
the gradient of a function,
the "potential". For such forces, if the potential is time
independent, the force is said to be
"conservative", and the work along a path is just minus the chage of
the potential, thanks to the
fundamental theorem of calculus applied to line integrals. The work
for such a force is therefore
independent of the path that connects two given endpoints. By
Stokes' theorem, this is realted to the
fact that the curl of such a force is zero, since the curl of the
gradient of anything is zero.
Showed that central forces F
= f(r) rhat are derivable
from a potential. The key is that grad
r = rhat,
which I explained both computationally and in terms of the
geometrical interpretation of the gradient:
it points in the direciton of greatest rate of change of the
function, and has magnitude equal to that
rate of change. Thus we can write
f(r) rhat = f(r) grad r = grad (∫ rf(r') dr')
which shows that the potential for this radial force is U(r) = U(r) = -∫ rf(r')
dr'.
Next applied this to the gravitational force between two particles
(cf. section 4.9).